引言
人工智能系统的安全问题是当前学术界与工业界共同关注的热点。在众多安全威胁中,利用光学物理效应对 AI 感知系统进行攻击的研究尤为引人注目——攻击者不需要接触目标设备,也不需要破解网络协议,仅通过操控光信号就能欺骗 AI 系统做出错误的判断。
本文对两篇安全领域顶级会议论文进行逐页联合分析与梳理:
- Adversarial Sensor Attack on LiDAR-based Perception(ACM CCS 2019)——利用激光欺骗 LiDAR 感知系统,在自动驾驶车辆前方制造”假障碍物”
- Light Commands: Laser-Based Audio Injection Attacks on Voice-Controllable Systems(USENIX Security 2020)——利用调制激光向语音助手注入恶意语音命令
两篇论文虽针对不同的 AI 应用场景,却在攻击范式上高度相似:利用传感器物理特性的局限性,绕过 AI 系统的安全防护,实现远距离、无接触的注入攻击。
Paper 1: Adversarial Sensor Attack on LiDAR-based Perception in Autonomous Driving
- 作者: Yulong Cao 等
- 来源: ACM CCS 2019
- DOI: 10.1145/3319535.3339815
概述
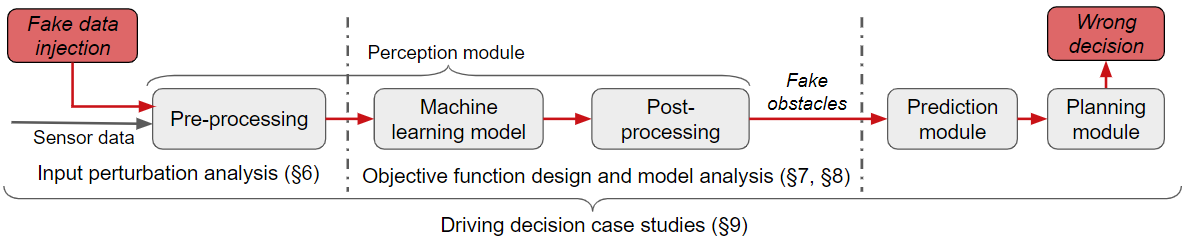
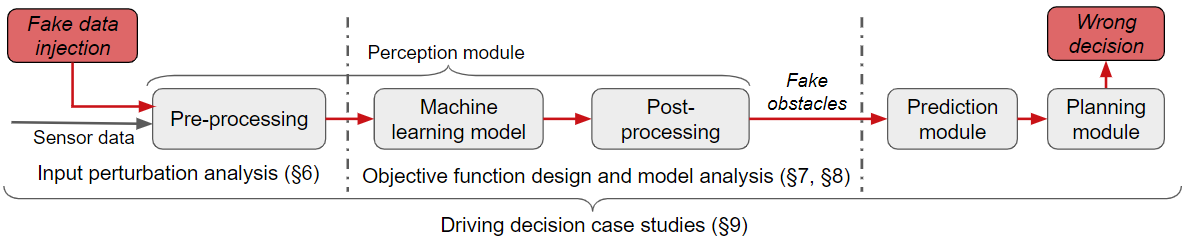 图 1: Adv-LiDAR 方法论总览——从物理层 LiDAR spoofing 到感知模型对抗攻击的完整框架(Cao et al., CCS 2019 Fig. 2)
图 1: Adv-LiDAR 方法论总览——从物理层 LiDAR spoofing 到感知模型对抗攻击的完整框架(Cao et al., CCS 2019 Fig. 2)
这篇论文不是只证明 LiDAR 能被 spoof,而是问 spoof 出来的点能否骗过 AV 感知模型。作者选择 Baidu Apollo 作为目标平台,目标是让车前 2-8 m 出现假障碍物。方法把物理攻击能力、点云预处理、DNN 输出和后处理放进一个优化框架。
背景:LiDAR 感知管线
自动驾驶系统中的 LiDAR(激光雷达)通过发射激光脉冲并测量反射时间来感知周围环境。在百度 Apollo 等主流自动驾驶平台中,LiDAR 点云的处理流程通常包括以下步骤:
- 数据采集:原始 3D 点云 X
- 预处理:坐标变换、ROI 提取、将 3D 点云压缩为 2D 特征矩阵
- DNN 推理:输出 objectness(物体置信度)、positiveness(正面置信度)以及位置、方向、尺寸等参数
- 后处理:阈值过滤、连通图聚类、候选障碍物筛选
 图 2: Apollo 的 LiDAR 感知管线——从原始点云到障碍物检测的完整流程(Cao et al., CCS 2019 Fig. 1)
图 2: Apollo 的 LiDAR 感知管线——从原始点云到障碍物检测的完整流程(Cao et al., CCS 2019 Fig. 1)
这一管线意味着攻击者不能仅通过添加噪声点来欺骗系统,而需要让伪造点云通过整个 pipeline。Apollo 的模型输入不是原始点云,而是 3D 点云压成的 2D 特征矩阵。DNN 后还有后处理,所以只改变模型输出不等于最终出现障碍物。后续目标函数围绕 objectness/positiveness 设计,就是因为它们决定候选障碍物是否被保留。
威胁模型:物理层 LiDAR Spoofing
攻击者通过监听目标 LiDAR 的激光脉冲,在特定延迟后发射攻击激光,让 LiDAR 误以为存在真实的反射信号。延迟控制测距(纳秒级延迟对应厘米级距离变化),结合扫描序列可影响伪造点的空间位置分布。实验表明,攻击设备的可靠可控点数约为 60 个点,远少于真实车辆反射的密集点云。
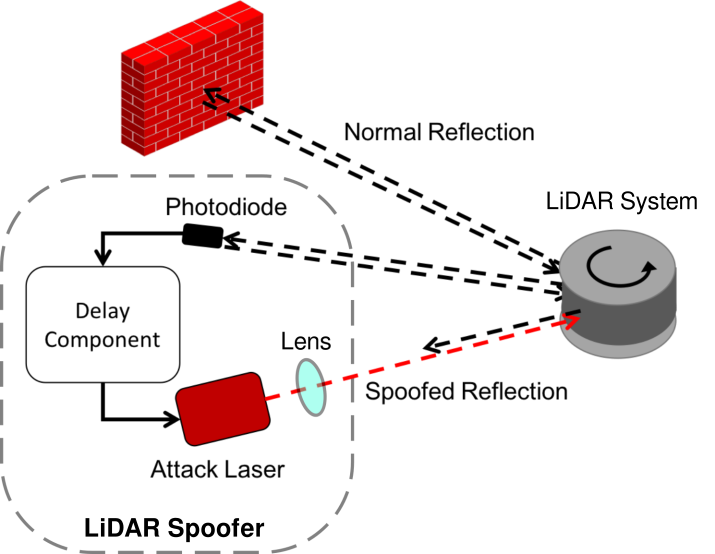 图 3: 攻击者用延迟组件触发激光,向受害 LiDAR 注入伪造点(Cao et al., CCS 2019 Fig. 3)
图 3: 攻击者用延迟组件触发激光,向受害 LiDAR 注入伪造点(Cao et al., CCS 2019 Fig. 3)
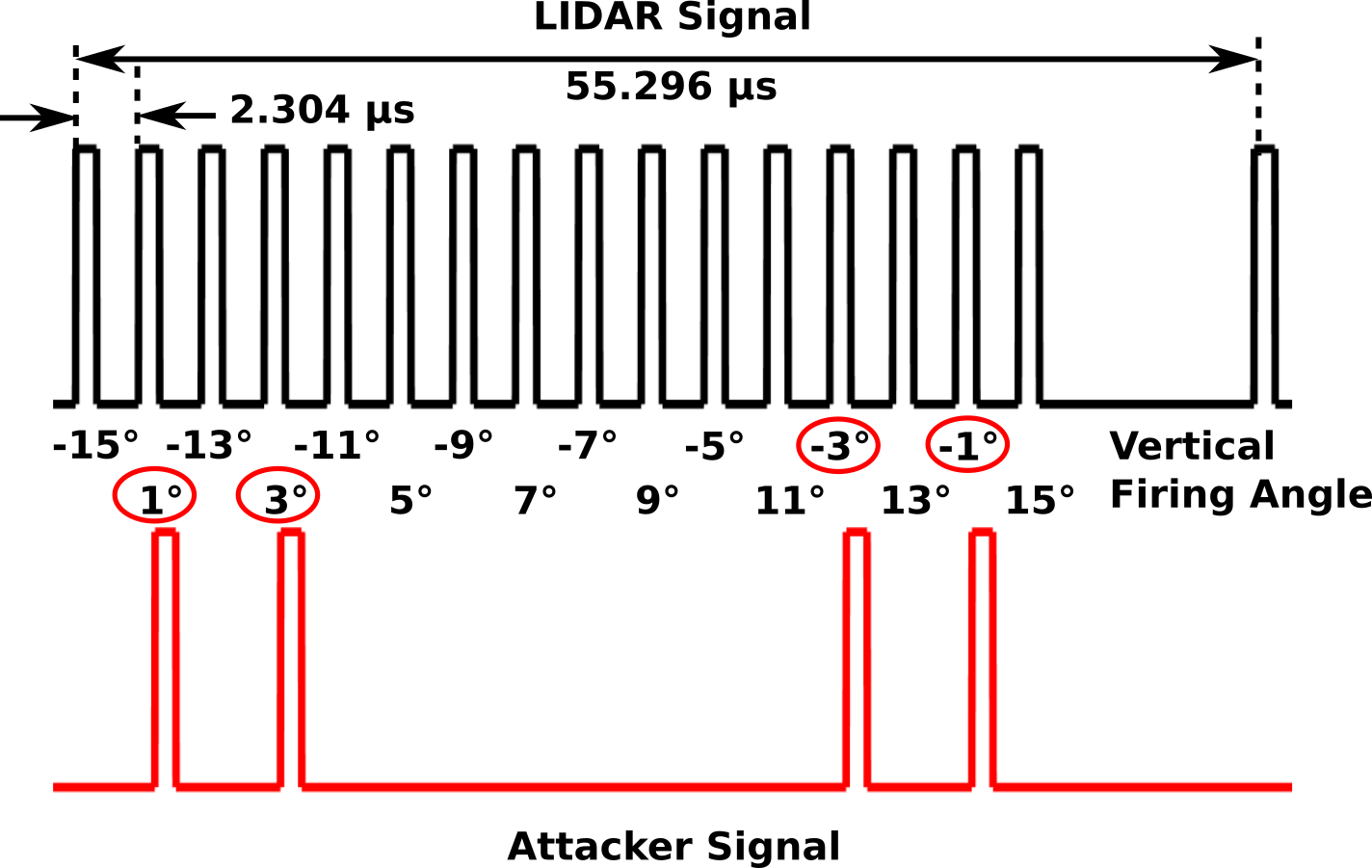 图 4: 固定 firing sequence 允许攻击者选择伪造点出现的角度和距离(Cao et al., CCS 2019 Fig. 4)
图 4: 固定 firing sequence 允许攻击者选择伪造点出现的角度和距离(Cao et al., CCS 2019 Fig. 4)
论文采用 white-box 分析,假设攻击者知道目标感知系统信息,用来研究最强风险边界。
盲目注入为什么不够
在提出完整攻击方法前,作者先通过实验证明:盲目的随机点注入无法有效欺骗感知模型。
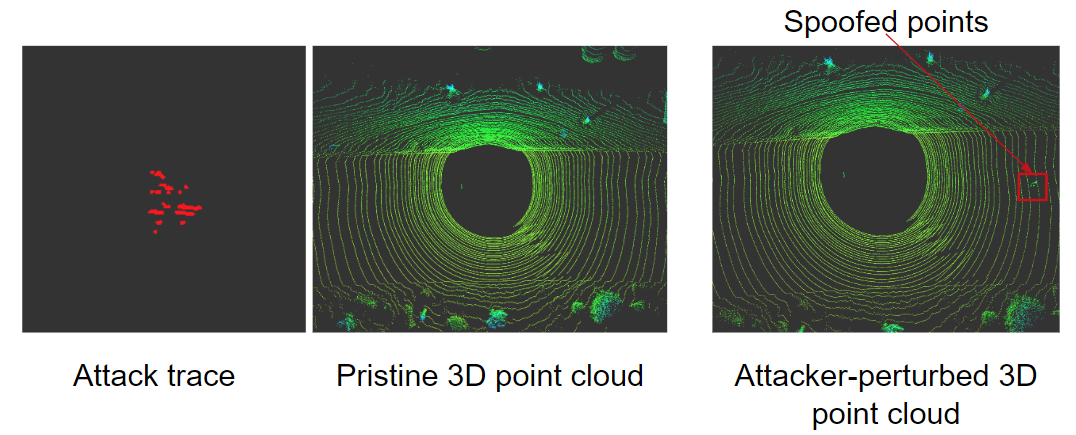 图 5: 把攻击实验采集到的 spoofed points 合成到真实 Apollo 点云中测试(Cao et al., CCS 2019 Fig. 5)
图 5: 把攻击实验采集到的 spoofed points 合成到真实 Apollo 点云中测试(Cao et al., CCS 2019 Fig. 5)
真实车辆反射点云通常更宽、更密集。攻击设备可靠可控点数有限,论文实测约 60 个点。Apollo 的 DNN + 聚类后处理会过滤掉很多”不像障碍物”的点模式。转折:必须从传感器 spoofing 升级为面向感知模型的对抗 spoofing。
攻击能力建模
论文的核心贡献在于将物理世界可实现的 LiDAR spoofing 转化为一个可优化的对抗攻击问题。攻击能力被分解为点数和空间可控性两部分:距离变化来自延时控制,高度变化来自切换垂直线,方位变化来自扫描时序和攻击位置。
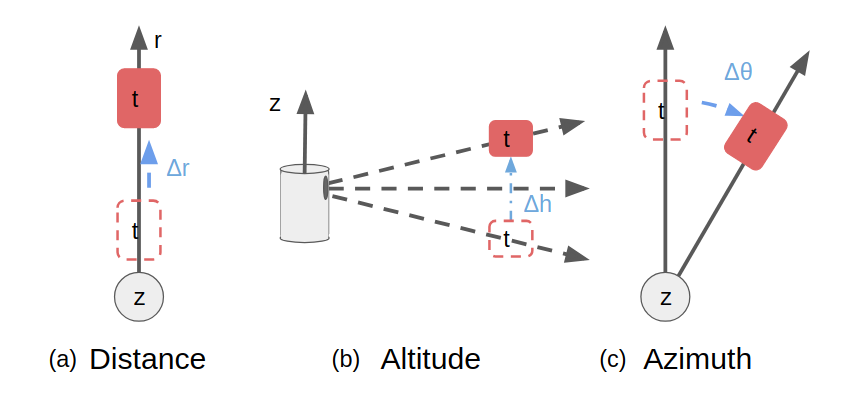 图 6: 距离、海拔高度、方位角三种可控扰动参数化(Cao et al., CCS 2019 Fig. 7)
图 6: 距离、海拔高度、方位角三种可控扰动参数化(Cao et al., CCS 2019 Fig. 7)
攻击能力 A 被形式化为:
- 点数:{20, 40, 60 points}
- 空间变换:全局旋转 θ + 平移 τx + 高度缩放 sh
这一步把物理世界能做的事,转成优化问题里的约束。
Adv-LiDAR 核心算法
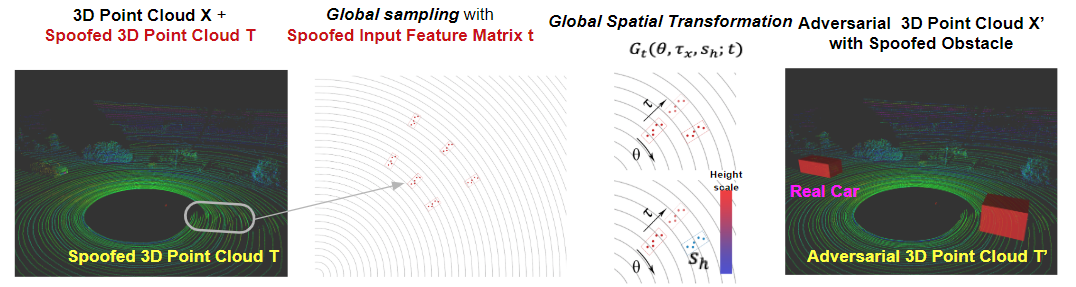 图 7: Adv-LiDAR 算法流程——从原始点云到 spoofed point cloud 的粗搜+细调优化(Cao et al., CCS 2019 Fig. 8)
图 7: Adv-LiDAR 算法流程——从原始点云到 spoofed point cloud 的粗搜+细调优化(Cao et al., CCS 2019 Fig. 8)
算法拆解:
- 将原始点云 X 和 spoofed point cloud T 映射到 2D feature matrix
- 在目标区域附近对 rotation θ、translation τx 做全局采样
- 用 Adam 优化 θ、τx、height scale sh
- 选择 loss 最小的一组参数,把 T 变成 T′ 并加入 X
对抗损失函数设计为:
L_adv = Σ(1 - objectness · positiveness) · GaussianMask(px, py)
目标不是让模型任意出错,而是在攻击者指定的前方位置生成候选障碍物。Gaussian mask 让优化集中在目标位置附近。最后输出的是物理上可解释的 spoofed point cloud,不是纯数字噪声。
优化策略分析
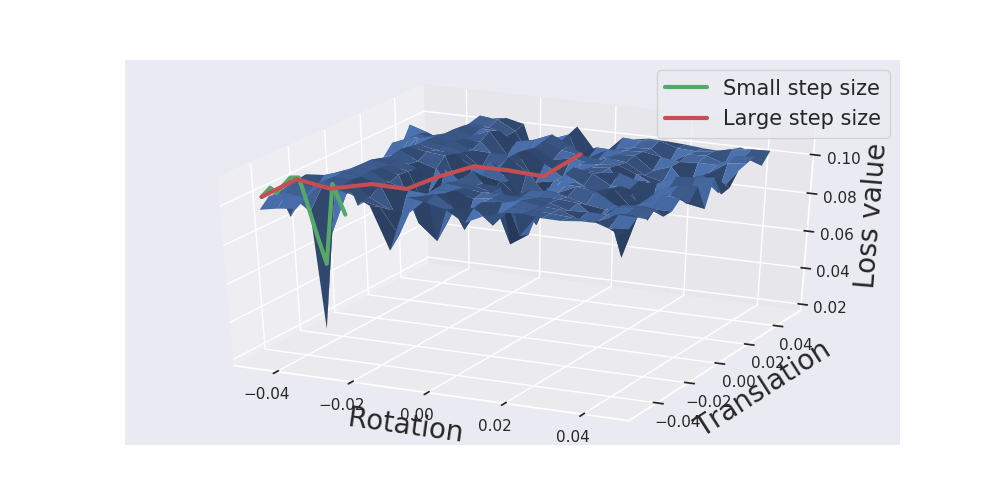 图 8: 小尺度 noisy,大尺度 flat——粗搜+细调策略的设计动机(Cao et al., CCS 2019 Fig. 9)
图 8: 小尺度 noisy,大尺度 flat——粗搜+细调策略的设计动机(Cao et al., CCS 2019 Fig. 9)
观察到 loss surface 存在局部噪声、全局平坦的特性。直接使用 Adam 等梯度优化器容易陷入局部最优。因此设计了两阶段策略:
- 先对旋转 θ 和平移 τx 进行全局采样(覆盖目标位置附近的空间)
- 再用 Adam 优化器进行局部微调
实验结果
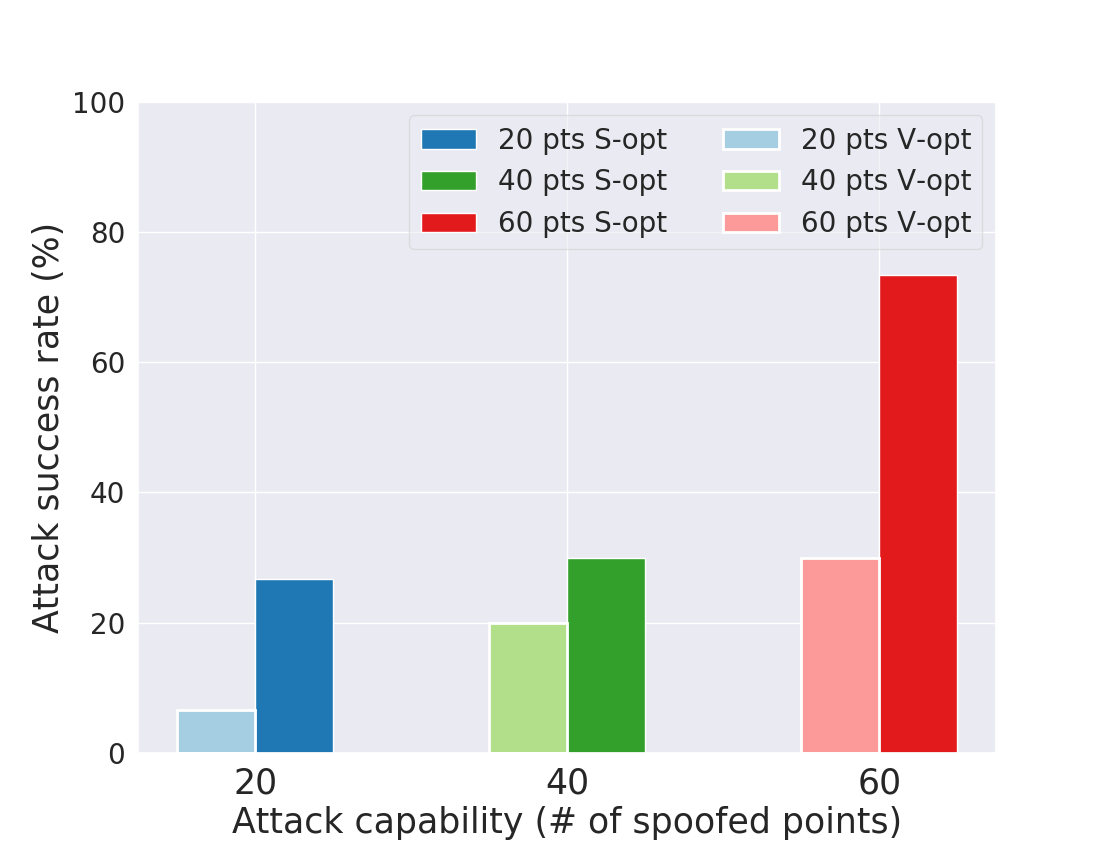 图 9: S-opt(粗搜+细调)显著优于 V-opt(纯视觉优化),60 点时约 75% 成功率(Cao et al., CCS 2019 Fig. 10)
图 9: S-opt(粗搜+细调)显著优于 V-opt(纯视觉优化),60 点时约 75% 成功率(Cao et al., CCS 2019 Fig. 10)
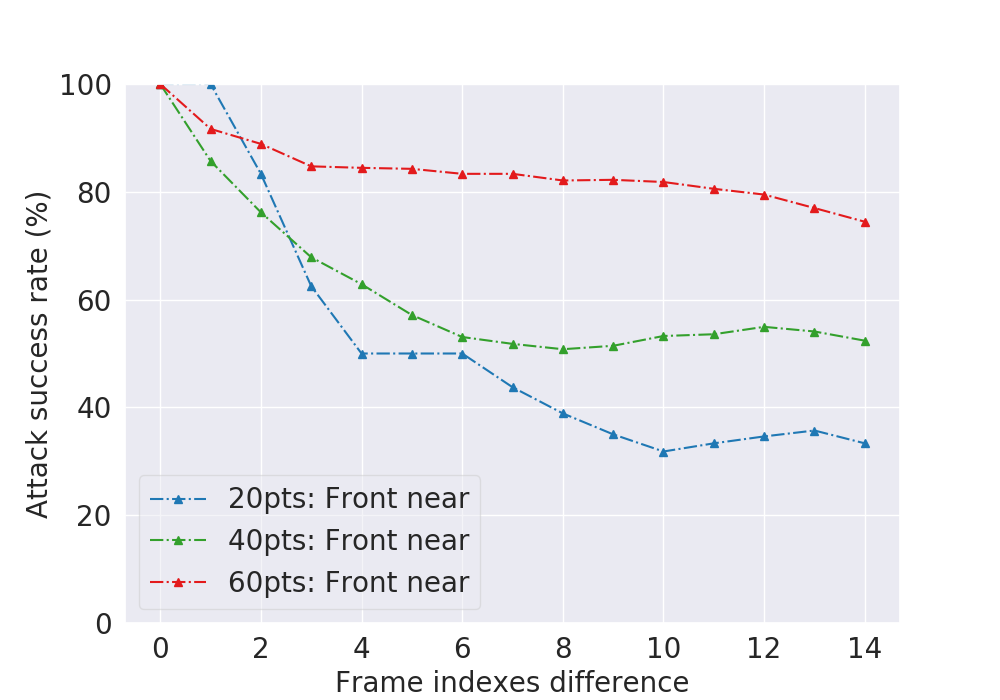 图 10: 60 个伪造点注入后约 15 帧保持较高成功率(Cao et al., CCS 2019 Fig. 11)
图 10: 60 个伪造点注入后约 15 帧保持较高成功率(Cao et al., CCS 2019 Fig. 11)
关键结果:
- 使用 Baidu Apollo 公开真实 LiDAR trace,均匀采样 300 帧
- 攻击目标是前方 2-8 m 障碍物
- 粗搜+细调策略(S-opt)将平均成功率从 18.9% 提升到 43.3%,平均提升 2.65 倍
- 60 点能力时成功率约 75%
- 对后续约 1.5 秒的连续帧仍有鲁棒性,说明攻击不要求车辆位置完全固定
驾驶影响分析
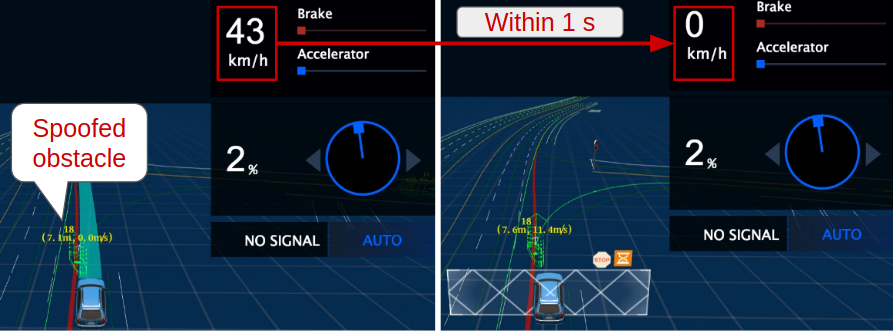 图 11: 假障碍物导致急刹——速度从 43 km/h 降至 0 km/h,约 1 秒(Cao et al., CCS 2019 Fig. 12)
图 11: 假障碍物导致急刹——速度从 43 km/h 降至 0 km/h,约 1 秒(Cao et al., CCS 2019 Fig. 12)
 图 12: 红灯后绿灯,车辆被假障碍物阻止启动(Cao et al., CCS 2019 Fig. 13)
图 12: 红灯后绿灯,车辆被假障碍物阻止启动(Cao et al., CCS 2019 Fig. 13)
在驾驶影响方面,Apollo Sim-control 仿真显示:假障碍物会导致规划层执行急刹决策(43 km/h → 0 km/h,约 1 秒)。如果车辆在红灯前静止,攻击者持续伪造近障碍物,绿灯后也可能阻止车辆启动。
实际攻击效果
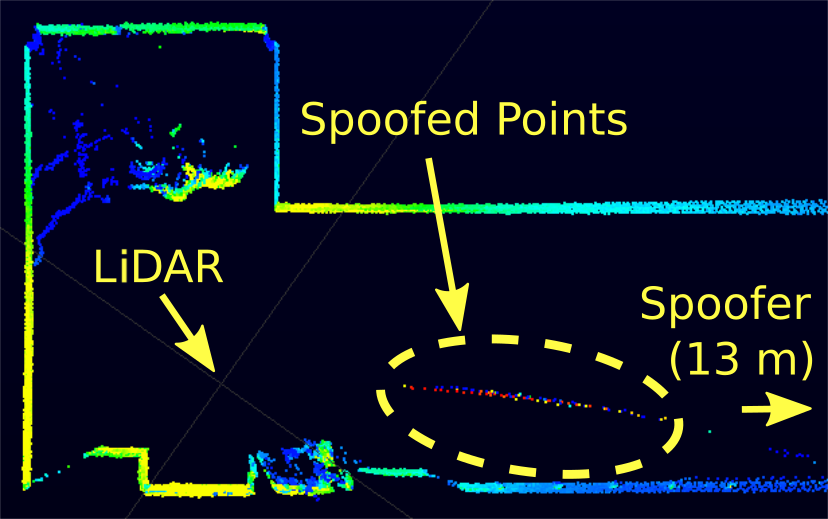 图 13: 在实际实验中采集到的 spoofed points 分布(Cao et al., CCS 2019 Fig. 14)
图 13: 在实际实验中采集到的 spoofed points 分布(Cao et al., CCS 2019 Fig. 14)
小结
Adv-LiDAR 的核心贡献在于把物理可实现的 LiDAR spoofing 与机器学习感知 pipeline 的目标优化连接起来。系统设计上,3D 点云压成 2D 特征会损失高度信息,地面反射点可能被错误聚进假障碍物。局限在于作者并未在真实道路上攻击完整的自动驾驶系统,动态瞄准仍是未来工作。
Paper 2: Light Commands: Laser-Based Audio Injection Attacks on Voice-Controllable Systems
- 作者: Takeshi Sugawara 等
- 来源: 29th USENIX Security Symposium, 2020
概述
 图 14: 110+ 米远距离攻击实验环境(Sugawara et al., USENIX Security 2020 Fig. 1)
图 14: 110+ 米远距离攻击实验环境(Sugawara et al., USENIX Security 2020 Fig. 1)
题目: Light Commands: Laser-Based Audio Injection Attacks on Voice-Controllable Systems 来源/年份: USENIX Security Symposium · 2020
解决什么问题: 语音助手(如 Alexa、Siri、Google Assistant)是否会被激光注入的虚假语音命令欺骗。 怎么解决: 利用光电/光声效应,将语音命令调制成激光信号,照射麦克风进音孔,使麦克风产生对应的电信号。
攻击原理:把声音改写成光
攻击链路分为两层:
物理层:攻击者准备普通语音命令录音(如 wake word + 具体命令),通过激光驱动器将音频波形调制到激光二极管的驱动电流上。光强随音频波形变化,形成幅度调制(AM)光信号。当调制光照射到麦克风的进音孔(microphone aperture)时,麦克风输出端会出现对应的音频电信号。
系统层:语音助手在处理音频输入时缺少足够的认证机制,将注入的电信号视为真实的语音命令并执行。
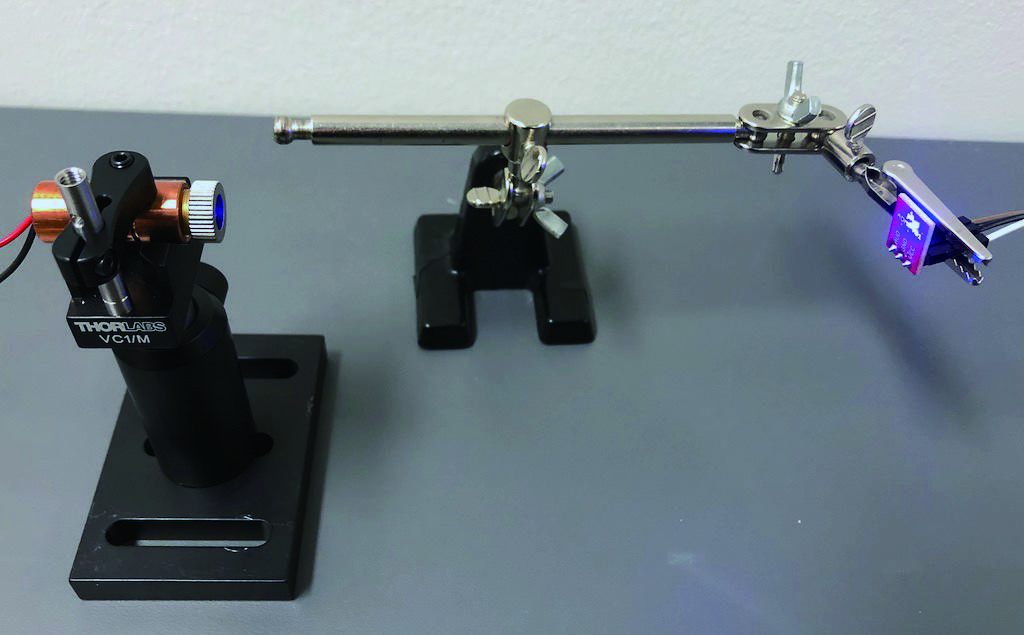 图 15: 攻击装置:PC → 放大器 → 激光二极管 → 照射 MEMS microphone(Sugawara et al., USENIX Security 2020 Fig. 5a)
图 15: 攻击装置:PC → 放大器 → 激光二极管 → 照射 MEMS microphone(Sugawara et al., USENIX Security 2020 Fig. 5a)
为什么麦克风会”听见”光?
论文区分了两种物理效应:
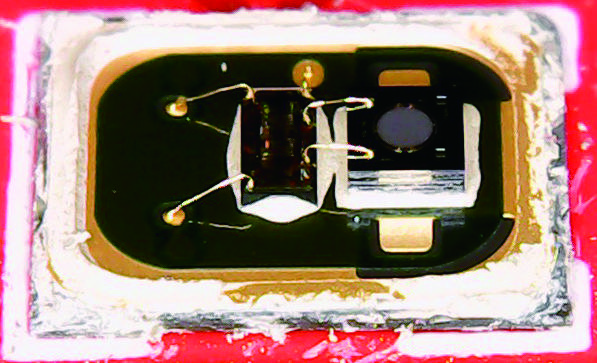 图 16: MEMS microphone 内部结构——ASIC 芯片和振膜(Sugawara et al., USENIX Security 2020 Fig. 2)
图 16: MEMS microphone 内部结构——ASIC 芯片和振膜(Sugawara et al., USENIX Security 2020 Fig. 2)
- Photoelectric effect(光电效应):激光直接照射麦克风 ASIC 芯片,产生电信号
- Photoacoustic effect(光声效应):激光照射麦克风振膜,引起热胀冷缩产生声波
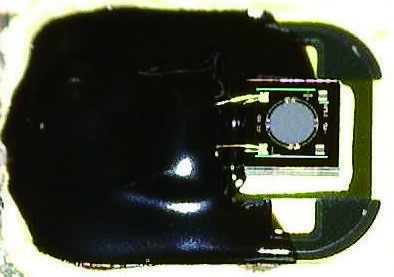 图 17: 遮蔽 ASIC 后用环氧树脂覆盖振膜,ASIC 侧仍可观测到响应(Sugawara et al., USENIX Security 2020 Fig. 7)
图 17: 遮蔽 ASIC 后用环氧树脂覆盖振膜,ASIC 侧仍可观测到响应(Sugawara et al., USENIX Security 2020 Fig. 7)
直接照射 ASIC 时,小于 0.1 mW 的功率就能让 ADMP401 麦克风饱和。即使遮住 ASIC 后照射振膜仍有信号,说明实际攻击可能是两种效应共同作用。
AM 调制模型
论文通过 1 kHz 正弦波验证了 AM 调制的可行性:激光电流正弦变化时,麦克风输出出现匹配的 1 kHz 信号。频率响应覆盖可听频段,意味着攻击者可以注入完整的语音命令,而非仅单音调。
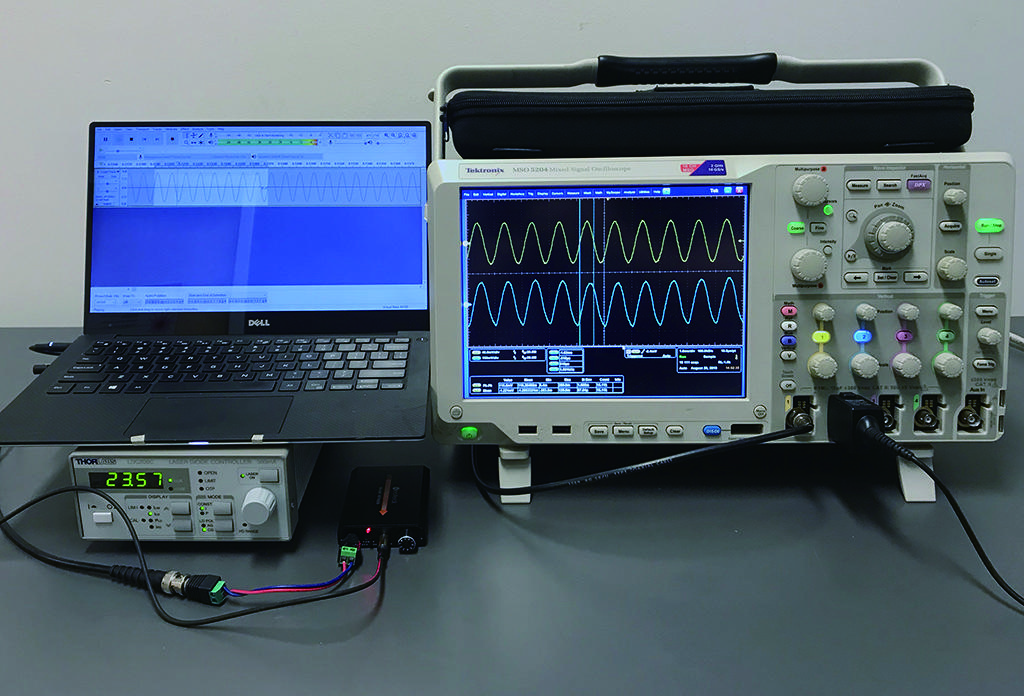 图 18: 激光电流 → 光功率 → 麦克风输出电压的传递函数(Sugawara et al., USENIX Security 2020 Fig. 5b)
图 18: 激光电流 → 光功率 → 麦克风输出电压的传递函数(Sugawara et al., USENIX Security 2020 Fig. 5b)
攻击特性分析
论文进一步研究了攻击的关键参数:
距离与功率关系:光功率密度随距离增加按平方衰减,但使用准直激光器可以大幅延长有效距离。Google Home 和 Echo Plus 在 5 mW 低功率下即可达到 110+ 米的攻击距离。
频率响应:AM 调制覆盖整个可听频段(20 Hz - 20 kHz),可以传递完整的语音指令。
设备测试与评估
设备测试:覆盖 17 个主流语音控制设备(Alexa、Siri、Google Assistant 等),命令集包含:查时间、音量归零、购物、IoT 控制等。
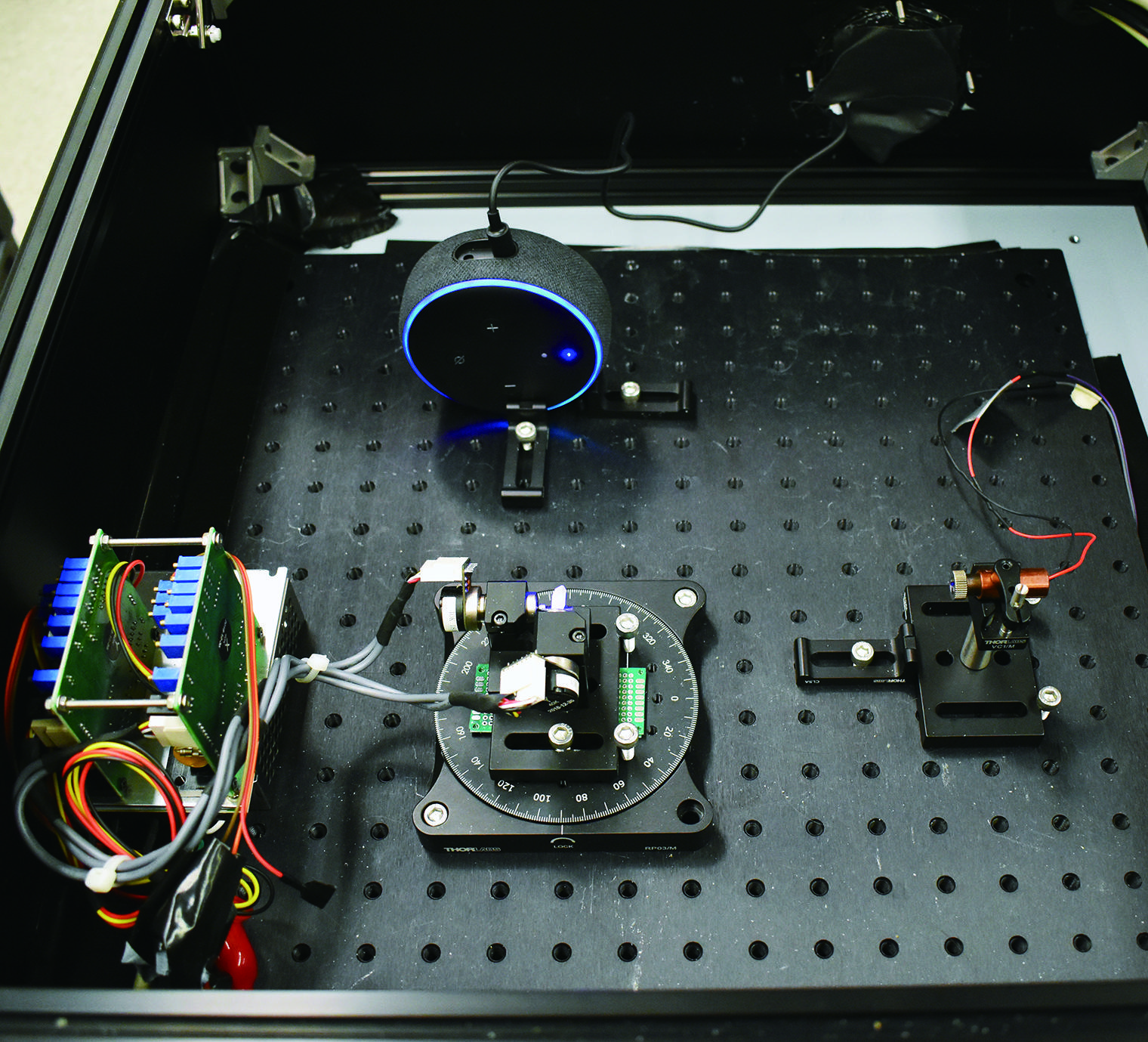 图 19: 各种设备在不同距离和功率下的测试平台(Sugawara et al., USENIX Security 2020 Fig. 8)
图 19: 各种设备在不同距离和功率下的测试平台(Sugawara et al., USENIX Security 2020 Fig. 8)
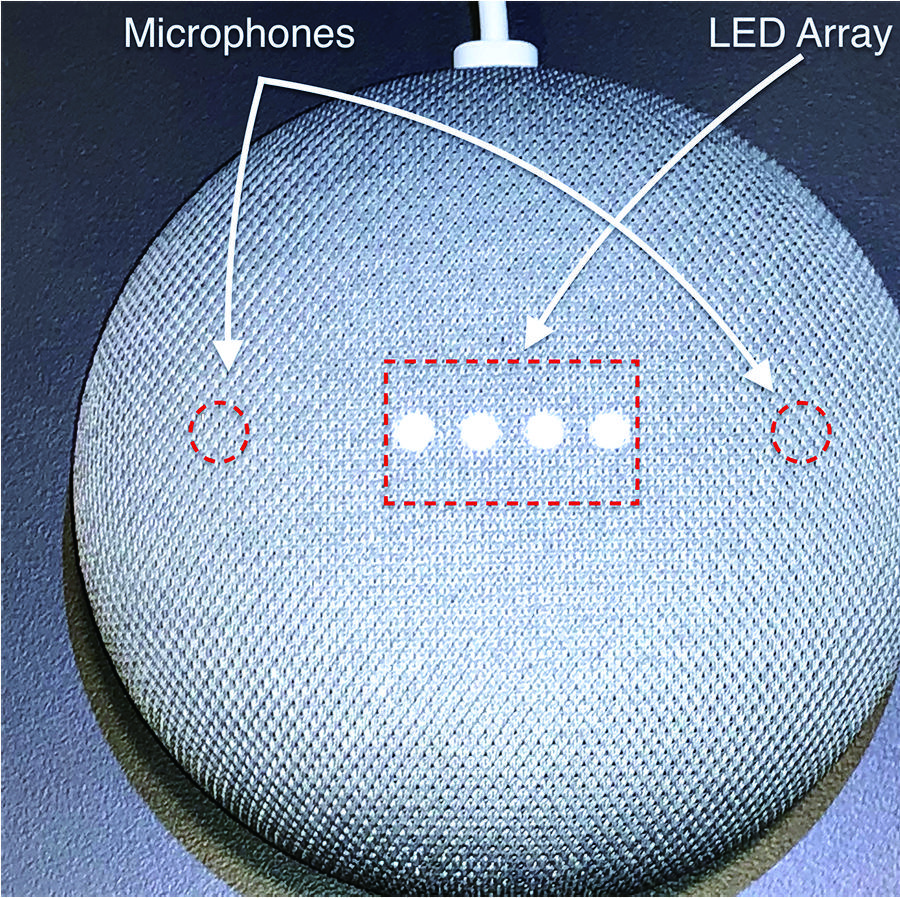 图 20: Google Home Mini 织物覆盖下的 microphone ports(Sugawara et al., USENIX Security 2020 Fig. 9)
图 20: Google Home Mini 织物覆盖下的 microphone ports(Sugawara et al., USENIX Security 2020 Fig. 9)
关键结果:
- Google Home 和 Echo Plus 在 5 mW 低功率下即可达到 110+ 米的攻击距离
- 多数设备在 60 mW 功率下可达到数米到 50+ 米
- 跨楼实验使用 5 mW 激光,攻击距离约 75 米,且能穿过闭合的双层玻璃窗
跨楼攻击实验
 图 21: ~75 m 跨楼攻击实验的几何关系(Sugawara et al., USENIX Security 2020 Fig. 10a)
图 21: ~75 m 跨楼攻击实验的几何关系(Sugawara et al., USENIX Security 2020 Fig. 10a)
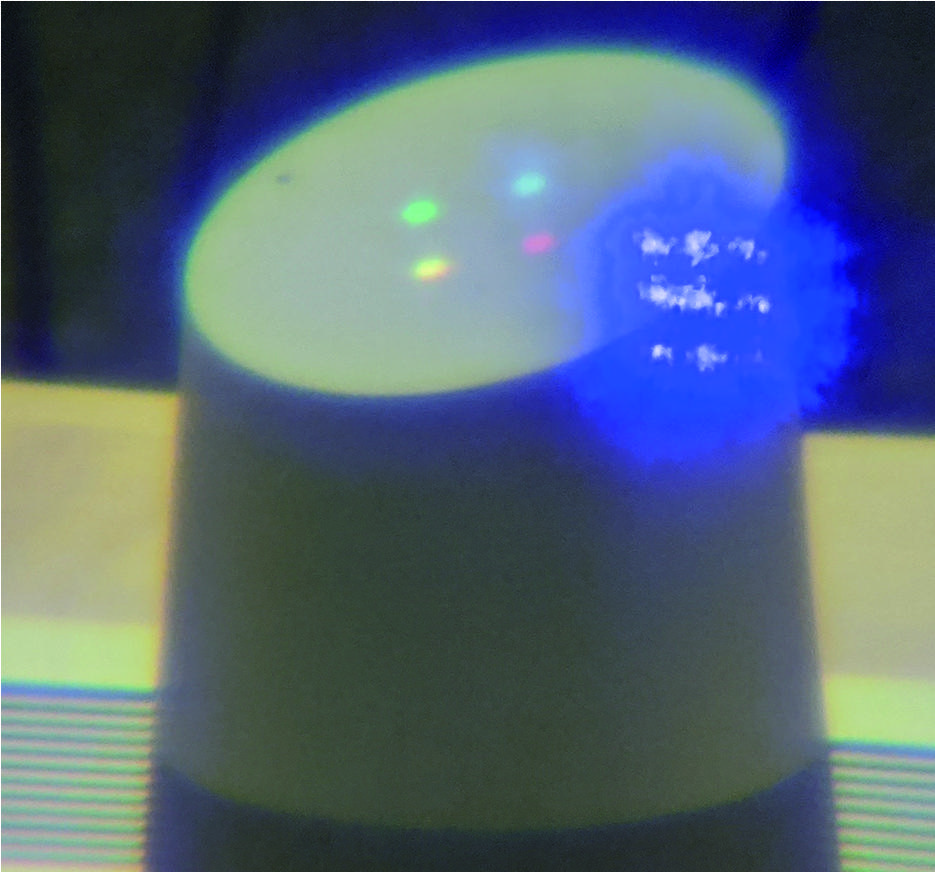 图 22: 从对面楼可见目标设备 microphone port 上的 laser spot(Sugawara et al., USENIX Security 2020 Fig. 10b)
图 22: 从对面楼可见目标设备 microphone port 上的 laser spot(Sugawara et al., USENIX Security 2020 Fig. 10b)
跨楼实验使用 5 mW 激光从一栋楼照射对面楼的语音设备,成功注入命令。攻击距离约 75 米,且能穿过闭合的双层玻璃窗。这一结果说明攻击者完全可以在不被发现的情况下远程发起攻击。
隐蔽性与低成本
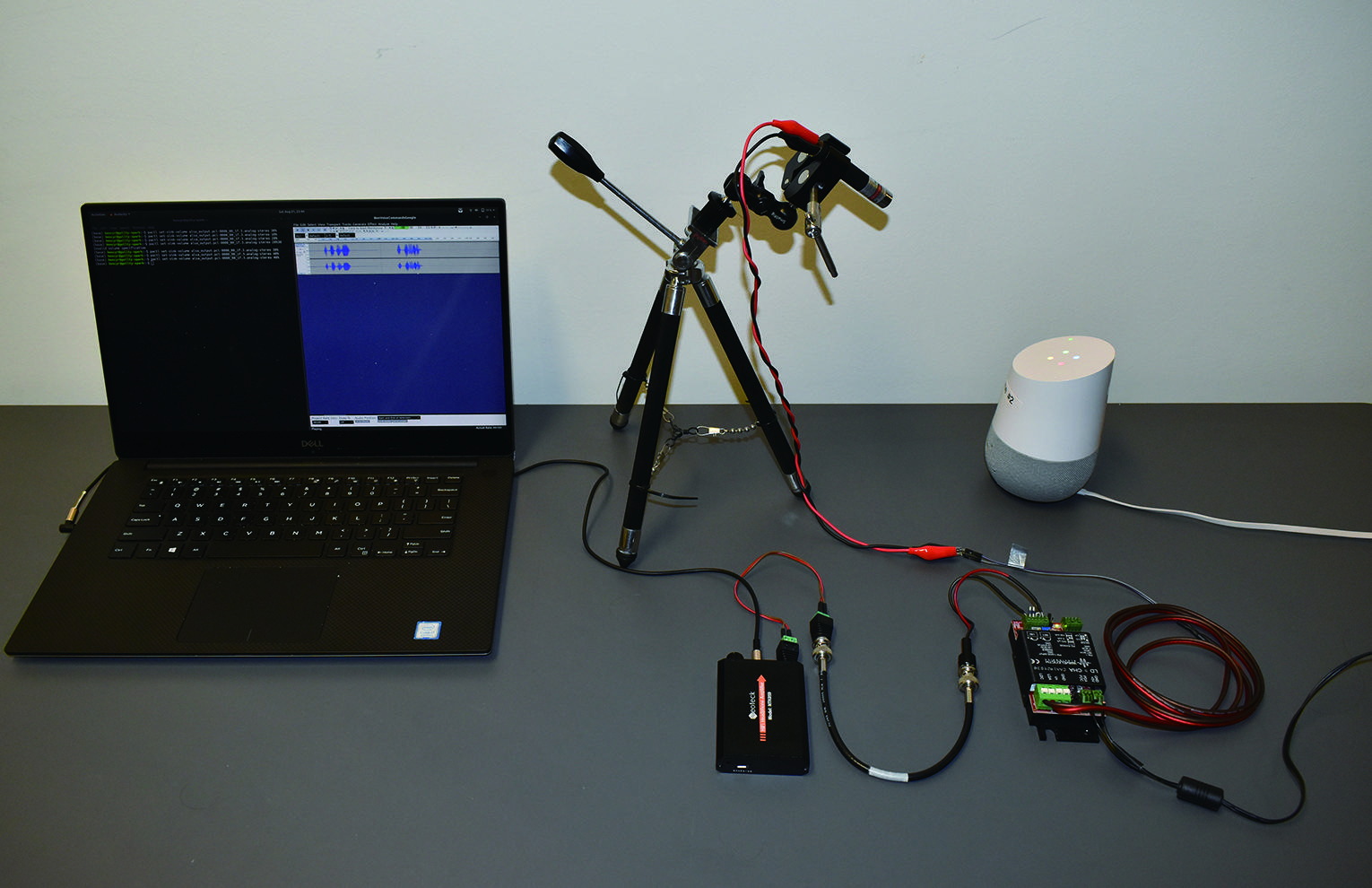 图 23: 低成本激光指示器攻击 setup(Sugawara et al., USENIX Security 2020 Fig. 12)
图 23: 低成本激光指示器攻击 setup(Sugawara et al., USENIX Security 2020 Fig. 12)
 图 24: MEMS 麦克风也可被激光注入(Sugawara et al., USENIX Security 2020 Fig. 13)
图 24: MEMS 麦克风也可被激光注入(Sugawara et al., USENIX Security 2020 Fig. 13)
攻击者可以进一步提高隐蔽性:先将设备音量调到零、使用红外激光隐藏可见光斑、用大光斑降低精确瞄准需求。
 图 25: 使用 telephoto lens 在 110 m 外聚焦瞄准目标设备(Sugawara et al., USENIX Security 2020 Fig. 1b)
图 25: 使用 telephoto lens 在 110 m 外聚焦瞄准目标设备(Sugawara et al., USENIX Security 2020 Fig. 1b)
安全影响与攻击面
为什么这种攻击能造成真实后果?论文揭示了语音助手”认证链路”的脆弱性:
- 智能门锁/车库门:PIN 可被窃听、暴力枚举,或某些命令根本无 PIN 认证
- Tesla 第三方集成:可查位置、锁/解锁、充电、空调控制
- FordPass 集成:关键命令虽有 PIN 保护,但论文发现缺少有效的防暴力枚举机制
- 手机/平板:只需匹配 owner 的 wake word,后续命令可拼接其他声音
- 智能音箱的 speaker recognition:很多时候是个性化功能,而非严格的用户认证
小结
Light Commands 的核心贡献在于将光学物理效应与语音助手安全模型连接起来。防御不能仅靠语音识别算法,还需要考虑麦克风硬件层面是否允许光直射。论文建议从三个层面防御:软件层(随机 challenge、多麦克风一致性检测)、硬件层(不透光 barrier/cover)、认证层(真正的 liveness 与 continuous authentication)。
两篇论文的对比与启示
| 维度 | Adv-LiDAR (CCS 2019) | Light Commands (USENIX Security 2020) |
|---|---|---|
| 攻击媒介 | 激光脉冲注入(LiDAR 波段) | 幅度调制激光(可见光/红外) |
| 目标传感器 | LiDAR(激光雷达) | MEMS 麦克风 |
| 攻击目标系统 | 自动驾驶感知(Apollo) | 语音助手(Alexa/Siri/Google) |
| 物理原理 | 激光延时欺骗 ToF 测距 | 光电/光声效应产生电信号 |
| 攻击距离 | 近距离(厘米-米级) | 远距离(可达 110 米+) |
| 核心洞察 | 物理 spoofing + ML 优化 | 物理转导 + 弱认证 |
| 防御方向 | 多传感器融合、滤波、对抗训练 | 硬件屏障、多麦克风一致性、强认证 |
两篇论文共同揭示了 AI 安全研究中的一个重要趋势:攻击者正在从”数字世界”向”物理世界”扩展攻击面。传统上,我们认为 AI 系统的安全威胁主要来自数据投毒、对抗样本等数字攻击。而这两篇论文证明:攻击者可以通过操纵物理世界的传感器输入——哪怕只是几束光——就能让最先进的 AI 系统做出错误决策。
从防御角度看,两篇论文给出的建议也高度一致:
- 硬件层面加固:增加物理防护(如对麦克风进音孔加装屏障、对 LiDAR 接收端进行滤波)
- 多模态融合:不依赖单一传感器,通过交叉验证提高鲁棒性
- 系统层认证:对关键操作增加额外认证环节(如 PIN、生物特征)
总结
本文对 Adv-LiDAR(CCS 2019)和 Light Commands(USENIX Security 2020)两篇安全顶会论文进行了完整的逐页分析。尽管两篇论文针对不同的 AI 应用场景——一个是自动驾驶感知,一个是语音助手控制——但它们在攻击范式和防御启示上展现出惊人的一致性。
两篇论文共 21 页幻灯片、25 张图表,完整覆盖了从物理攻击原理、算法设计、实验评估到安全影响的全链条分析。这些研究表明,AI 系统安全不能仅停留在算法层面。传感器的物理特性、系统的认证链路、多模态的冗余设计,都是构建安全可靠 AI 系统不可或缺的组成部分。
参考文献
- Cao, Y., et al. “Adversarial Sensor Attack on LiDAR-based Perception in Autonomous Driving.” ACM CCS 2019.
- Sugawara, T., et al. “Light Commands: Laser-Based Audio Injection Attacks on Voice-Controllable Systems.” USENIX Security Symposium 2020.