引言
 图 2: 自动驾驶传感器与语音助手安全攻击示意图
图 2: 自动驾驶传感器与语音助手安全攻击示意图
本次组会汇报聚焦于AI系统的物理层安全,探讨了三篇从不同角度揭示智能系统传感器脆弱性的论文:
- USENIX Security 2025 — Shadow Hack:通过在路面铺设特殊材料制造点云阴影,欺骗自动驾驶LiDAR检测模型凭空产生虚假障碍物;
- DEF CON 24 — 传感器非接触攻击:通过声、电磁波、光等物理信道,对特斯拉的超声波雷达、毫米波雷达和摄像头实施干扰与欺骗;
- ACM CCS 2017 — DolphinAttack:利用超声波载波将人耳不可闻的语音指令注入智能语音助手。
这三篇论文虽然针对的传感器和目标系统各异,但其核心思路高度一致——系统默认信任传感器物理层输入,而攻击者正是利用了这种信任,在物理层注入或篡改信号,使上层AI算法基于被污染的数据做出错误决策。
Paper 1: Shadow Hack — 利用激光雷达阴影欺骗3D目标检测
| 属性 | 信息 |
|---|---|
| 会议 | USENIX Security 2025 |
| 作者 | Ryunosuke Kobayashi, et al. |
| 核心 | Shadow Hack攻击+BBValidator防御,材料制造LiDAR空洞使模型假阳性 |
背景与动机
3D 目标检测模型在处理时,受边界效应和深度学习特征提取的影响,会错误地将这些“阴影边缘缺陷”当成物体的三维特征。
攻击概述
Shadow Hack的攻击目标不是让车消失,而是在无车处制造类似车后阴影的点云缺失区域。
图 3: Shadow Hack
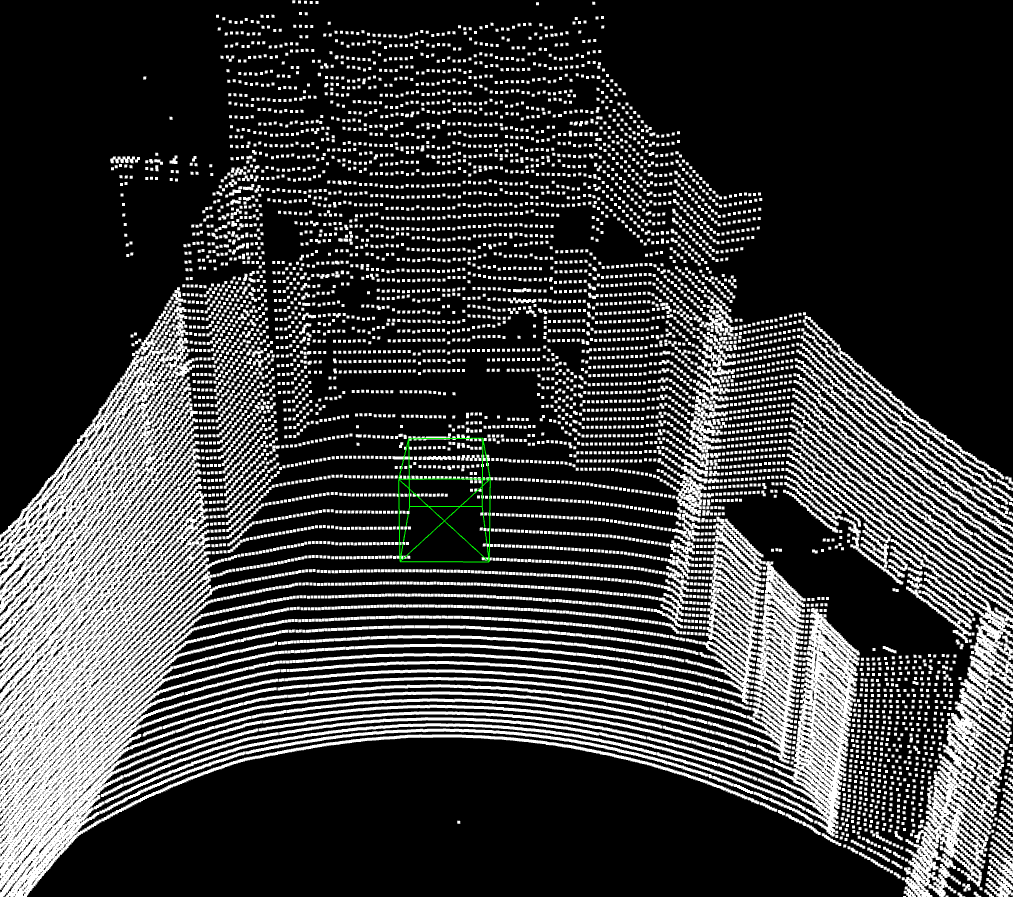 图 4: Shadow Hack
图 4: Shadow Hack
背景与动机
实验系统包含虚拟仿真测试平台(基于 CARLA / OpenPCDet)以及真实的物理光学暗室测试台(包含 16 线/64 线真实激光雷达)。
整个实验输入的是控制良好的材料几何形状,输出则是送入下游 AI 模型的点云矩阵。
形状优化
为了便于优化,论文将LiDAR扫描形成的扇形阴影近似为一个梯形,用三个参数描述:上底(a)、下底(b)、长度(l)。
优化目标是,在车辆距离7到17米的范围内,最大化模型将该区域检测为汽车的帧数。
最终优化出的高效形状参数为:a=1.4米,b=1.6米,l=5.0米。
 图 5: 优化
图 5: 优化
形状优化
矩形阴影有效的原因——训练数据(KITTI)中被标注为汽车的阴影多为矩形。因为真实车辆通常是盒状物体,遮挡/阴影结构也更像矩形。
这说明Shadow Hack的成功高度依赖于特定数据集和模型的训练偏差。
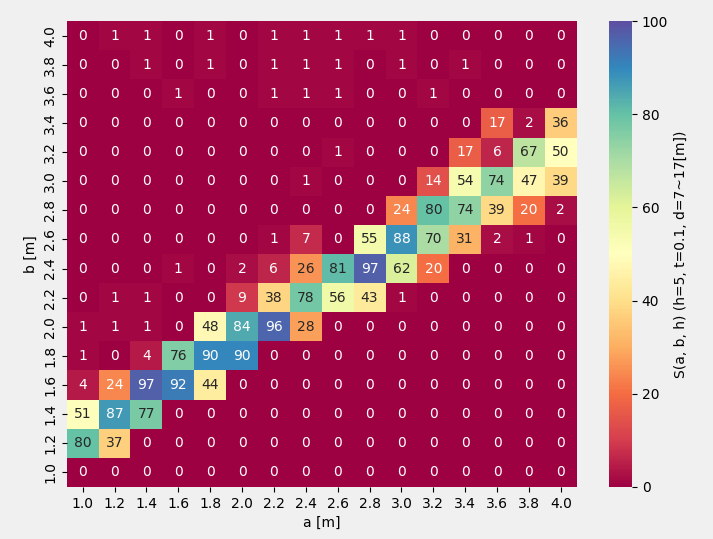 图 6: 优化
图 6: 优化
阴影材料研究
镜面片在多个 LiDAR 上平均接近 100% 点云移除,最适合攻击。
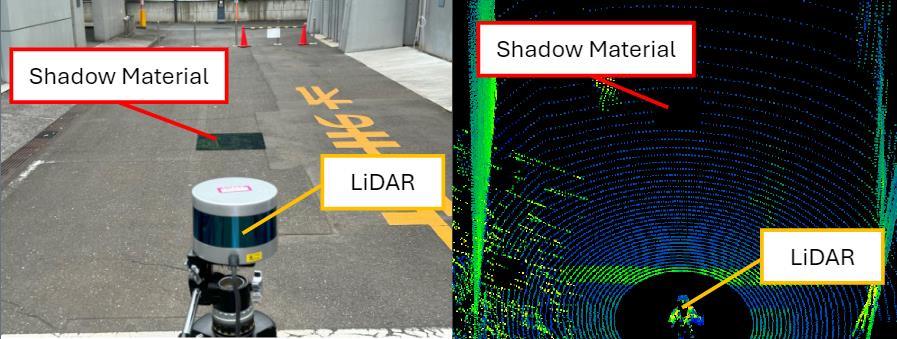 图 7: 材料
图 7: 材料
阴影材料研究
论文报告镜面片在 VLP-16、OS0-64、OS1-64、QT128、M1 上平均点云移除率分别约 99.8%、98.3%、98.2%、96.5%、99.0%。
 图 8: 材料
图 8: 材料
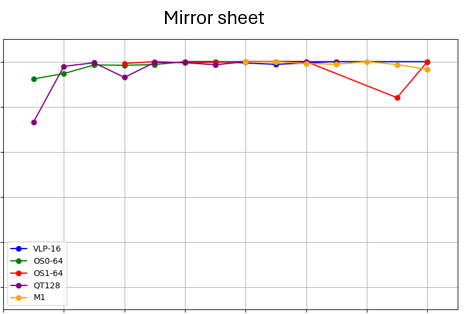 图 9: 材料
图 9: 材料
攻击效果
左图展示了攻击成功率随距离的变化。对于PointPillars模型,在约11到21米的距离范围内,攻击能持续成功。
右图展示了攻击对不同检测模型的效果。voxel-based 基于体素的模型(PointPillars, SECOND-IoU)非常脆弱,成功率接近100%。而point-based 基于原始点的模型(PointRCNN)的成功率为0%。
Shadow Hack对不同模型的有效性差异巨大,主要影响voxel-based模型。
 图 10: 效果
图 10: 效果
 图 11: 效果
图 11: 效果
攻击效果
物理实验成功复现了仿真结果。在10米和15米的距离上,对PointPillars和SECOND-IoU模型的攻击成功率分别达到了100%和98%等高水平,证实了Shadow Hack在真实世界的有效性。
 图 12: 效果
图 12: 效果
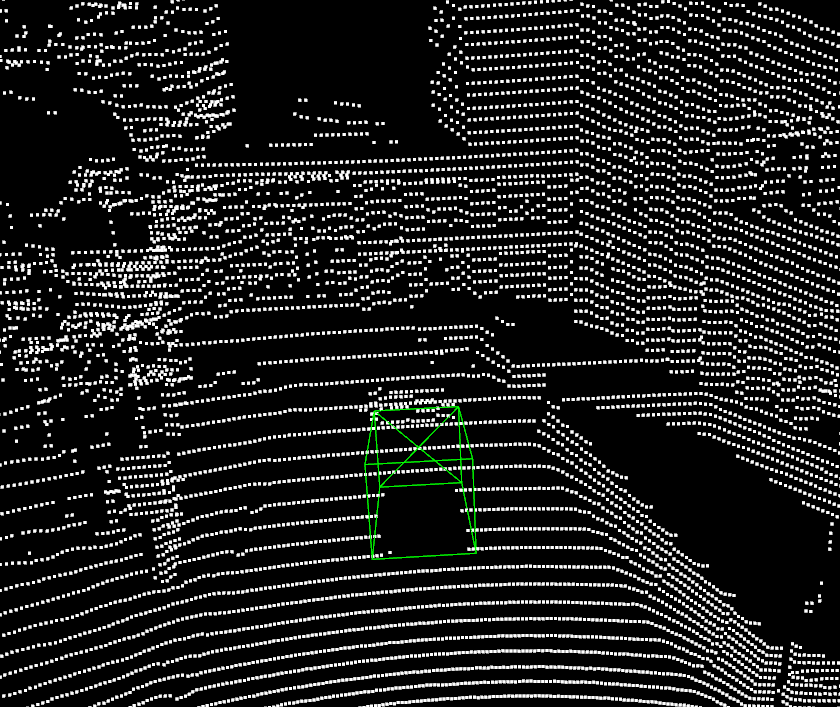 图 13: 效果
图 13: 效果
BBValidator防御
BBValidator 对检测模型输出的框做二次验证:
核心思想是:如果一个检测框内没有包含足够多的LiDAR点云,那它就是不可信的。
BBValidator防御
横轴是点云数量阈值,纵轴是底部抬高距离。颜色越紫,代表防御成功率越高。可以找到参数组合使得防御成功率接近100%。
合适参数下防御成功率达到 100%。
当dh=0.05米,Nthresh≥8时,防御成功率可达100%。
在标准的、没有攻击的KITTI数据集上,开启BBValidator后,模型的正常检测精度(3D AP)变化微乎其微,只有正负0.02。
这证明了BBValidator是一个精准且轻量的‘补丁’,它能够在不影响正常驾驶功能的情况下,有效地消除这种特定的安全隐患。
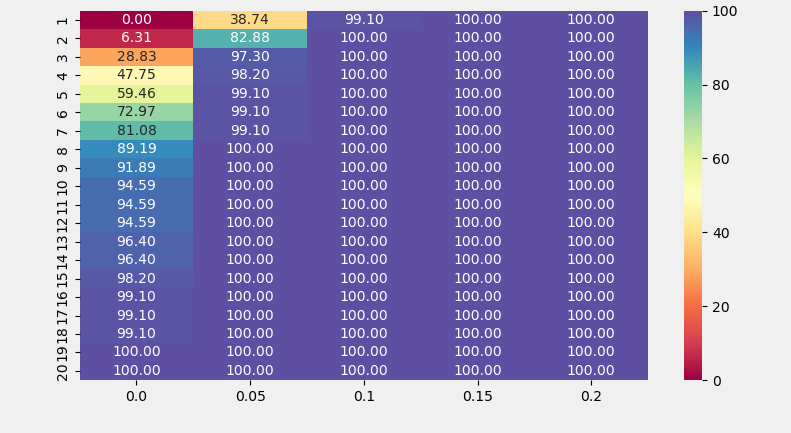 图 14: 防御
图 14: 防御
小结
不伪造信号,被动拿走点云。 优化参数 a=1.4m b=1.6m l=5.0m。
攻击必要条件
-
材料必须铺在激光雷达能扫到的有效地面和距离窗口内(例如论文实验中验证的 11-21 米)。太近了扫描角度太陡,太远了点云太稀疏,都无法拼凑出欺骗 AI 的“伪阴影特征”。
-
攻击者有时间窗口把平面材料放到目标车道,并让材料在车辆到来前保持位置和姿态。
-
不需要主动激光注入或精确同步 LiDAR 发射时序。
-
不需要入侵车辆、传感器或通信链路。
-
不需要明显 3D 对抗物体;平面材料更容易伪装成水坑/路面反光。
-
不需要持续在场操作,材料可提前部署。
Paper 2: 传感器非接触攻击 — 自动驾驶的致盲攻击
| 属性 | 信息 |
|---|---|
| 来源 | DEF CON 24, 2016 |
| 作者 | Chen Yan, Wenyuan Xu, Jianhao Liu |
| 核心 | Tesla实车验证超声波/雷达/摄像头jamming与spoofing |
背景与核心问题
传统车联网安全多关注 CAN(控制器局域网络)/ECU(电子控制单元);
本文指出自动驾驶安全依赖传感器完整性。自动驾驶算法天然默认‘传感器输入的数据都是真实的’。一旦传感器被物理信道干扰,后端算法即使没有被入侵,也会基于错误世界模型决策。
构造两类攻击:噪声淹没的 jamming;伪造回波/信号模式的 spoofing。
最后提出多传感器冗余、随机化、逻辑校验和攻击检测等防护方向。
三类传感器攻击面
共同点是:系统通常把传感器输出当作可信输入。
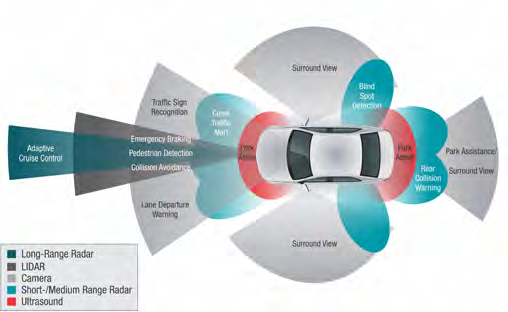 图 15: 论文原图 Fig.1:ADAS 主要传感器类型和典型部署位置
图 15: 论文原图 Fig.1:ADAS 主要传感器类型和典型部署位置
统一攻击框架
超声波攻击
超声波传感器发出约 40-50 kHz 脉冲,测量回波飞行时间:距离 d = 0.5 × 回波传播时间 × 声速。
攻击者使用信号发生器产生特定频率的电信号,经过放大后由超声波换能器定向发射,在同一频段持续发声或伪造短脉冲。
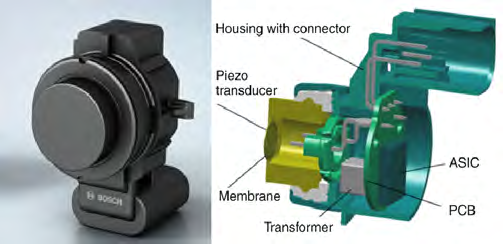 图 16: 论文原图 Fig.2:Bosch 超声波传感器外观与剖面
图 16: 论文原图 Fig.2:Bosch 超声波传感器外观与剖面
超声波攻击
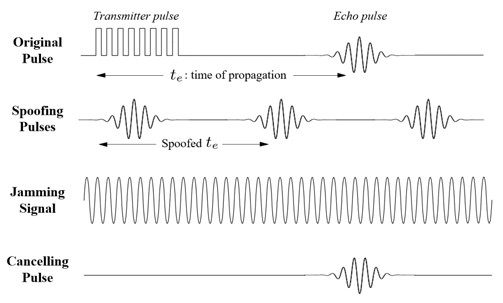 图 17: 论文原图 Fig.5:原始信号、spoofing、jamming、acoustic cancellation 波形示意
图 17: 论文原图 Fig.5:原始信号、spoofing、jamming、acoustic cancellation 波形示意
超声波实验结果
论文报告:在多款车上,jamming 会让真实障碍物不再触发警告;Tesla 上有效距离最长测到约 10 m。自动泊车/召唤功能中,Tesla 对部分干扰会立即停止,说明系统逻辑有所差异,但传感器层仍可被扰动。
 图 18: 正常:显示 66 cm
图 18: 正常:显示 66 cm
 图 19: 正常:显示 66 cm
图 19: 正常:显示 66 cm
 图 20: 正常:显示 66 cm
图 20: 正常:显示 66 cm
毫米波雷达攻击
第二组实验针对毫米波雷达。
Tesla Model S 使用 76-77 GHz车载雷达频段的高频无线电系统 ,并观察到 FMCW chirp 序列。
毫米波雷达工作在 76 到 77 GHz 的极高频段,属于射频领域,普通设备无法直接干预。作者利用低频信号发生器作为基础,外接高精度的倍频器,将信号强行提升至 76 GHz 的射频段,最后通过高增益的号角天线定向聚焦发射。
实验的输入是精心调制的电磁波,输出则是通过雷达射频前端捕获后的信噪比(SNR)变化。这组实验旨在评估多大的外部功率能够彻底摧毁自驾车的ACC远视眼。
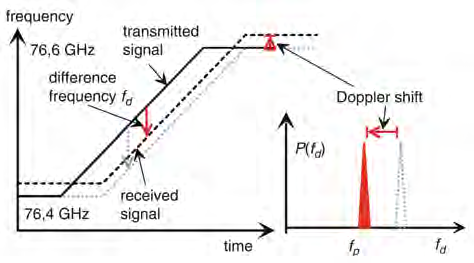 图 21: 论文原图 Fig.7:FMCW 正斜坡与接近目标的谱示意
图 21: 论文原图 Fig.7:FMCW 正斜坡与接近目标的谱示意
毫米波雷达实验结果
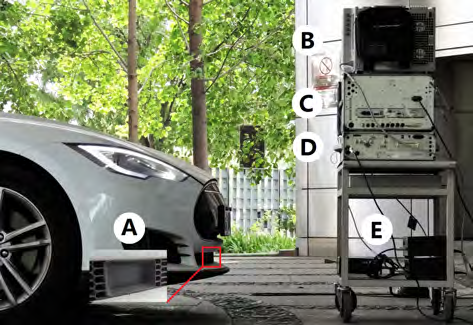 图 22: 论文原图 Fig.8:Tesla 雷达实验设备
图 22: 论文原图 Fig.8:Tesla 雷达实验设备
 图 23: 论文原图 Fig.8:Tesla 雷达实验设备
图 23: 论文原图 Fig.8:Tesla 雷达实验设备
 图 24: 论文原图 Fig.8:Tesla 雷达实验设备
图 24: 论文原图 Fig.8:Tesla 雷达实验设备
摄像头致盲攻击
第三组实验是针对摄像头的强光盲化攻击。
论文用 LED、可见激光、红外 LED 分别照射标定板或直接照射摄像头,观察图像输出和灰度/色调分布变化。
实验的输入是物理光通量,输出则是图像的像素饱和度以及上层识别算法的检出率。
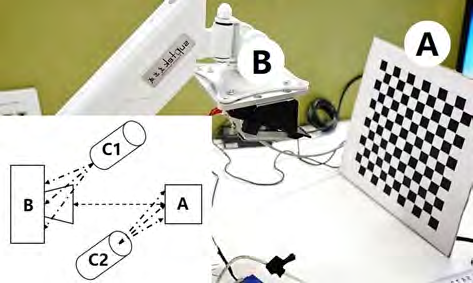 图 25: 论文原图 Fig.11:摄像头致盲实验设置
图 25: 论文原图 Fig.11:摄像头致盲实验设置
摄像头致盲攻击
 图 26: 摄像头
图 26: 摄像头
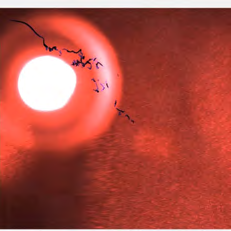 图 27: 摄像头
图 27: 摄像头
防护思路
检测异常高功率物理噪声,识别 jamming。
对物理层信号加入防伪随机性,降低伪造时隙命中率。
改进滤波、屏蔽和硬件保护。
多传感器冗余检查(Sensor Fusion):雷达、摄像头、超声波互证。
系统不能盲目听信单一传感器,而是要引入置信度优先级 and 交叉互证。
对“突然消失/突然出现”的目标建立攻击检测模型。
Paper 3: DolphinAttack — 超声波语音指令注入攻击
| 属性 | 信息 |
|---|---|
| 会议 | ACM CCS 2017 |
| DOI | 10.1145/3133956.3134052 |
| 作者 | Guoming Zhang, Chen Yan, Xiaoyu Ji, et al. |
| 核心 | MEMS麦克风非线性实现人耳不可闻语音指令注入 |
背景与核心问题
DolphinAttack发现MEMS麦克风的非线性特性可被超声波利用,实现人耳不可闻的语音指令注入。
漏洞根源:MEMS麦克风非线性
MEMS麦克风利用微机械振膜将声压转换为电信号。论文发现MEMS麦克风接收超声波时,机械振膜的非线性响应会产生意外解调——将高频超声波包络还原为可听基带信号。这是硬件物理层特性,无法通过软件补丁修复。
 图 28: MEMS麦克风结构与非线性特性
图 28: MEMS麦克风结构与非线性特性
攻击方法
- 调制语音到20kHz以上超声波载波
- 功率放大器+换能器发射
- MEMS麦克风非线性解调
- 语音系统正常识别
- 执行恶意操作
攻击者将语音指令调制到20kHz以上超声波载波,通过功率放大器和高频换能器发射。MEMS麦克风接收后非线性解调出低频语音信号。
使用AM调幅,载波频率20-30kHz。
 图 29: 信号调制与攻击原理
图 29: 信号调制与攻击原理
 图 30: 信号调制与攻击原理
图 30: 信号调制与攻击原理
 图 31: 信号调制与攻击原理
图 31: 信号调制与攻击原理
攻击设备
两种攻击平台:高功率固定平台(信号发生器+功放+换能器)和便携平台(手机改装换能器)。
 图 32: 便携式攻击设备
图 32: 便携式攻击设备
实验结果
覆盖Siri、Google Now、Alexa、Cortana等主流语音助手。近距离(<1m)成功率较高。测试拨打电话、发送短信、访问网址等敏感操作。
安全影响
安全威胁包括隐私泄露(拨打电话窃听)、金融损失(访问恶意网站)、拒绝服务(持续唤醒/关闭设备)、社交工程(假冒用户发消息)等。
防御措施
多层防御:硬件层面改进MEMS减少非线性;系统层面基带信号异常检测;应用层面敏感操作增加额外认证。
小结
利用MEMS麦克风物理层非线性特性,通过超声波注入人耳不可闻语音指令。硬件漏洞,软件补丁无法完全修复。
对比与讨论
| 维度 | Shadow Hack | 传感器攻击 | DolphinAttack | |——|————-|———–|—————|
| 目标系统 | 自动驾驶LiDAR检测 | 自动驾驶ADAS | 智能语音助手 |
| 攻击手段 | 被动材料造空洞 | 主动声/电磁/光 | 超声波调制语音 |
| 利用漏洞 | 模型训练偏差 | 传感器无认证 | MEMS非线性 |
| 攻击效果 | 假阳性障碍物 | 致盲/欺骗传感器 | 不可闻指令注入 |
| 防御思路 | BBValidator | 多传感器融合+异常检测 | 硬件滤波+基带检测 |
三篇论文揭示了共同模式:不要盲目信任单一传感器物理层输入。
总结
-
Shadow Hack:被动攻击,LiDAR检测假阳性率高达84%+
-
传感器攻击:超声波/雷达/摄像头jamming/spoofing,Tesla实车功能失效
-
DolphinAttack:MEMS麦克风硬件非线性漏洞
AI系统安全必须将传感器物理层输入可信度纳入整体架构。
参考文献
-
Ryunosuke Kobayashi, et al. “Invisible but Detected…” USENIX Security 2025.
-
Chen Yan, Wenyuan Xu, Jianhao Liu. “Can You Trust Autonomous Vehicles…” DEF CON 24, 2016.
-
Guoming Zhang, Chen Yan, Xiaoyu Ji, et al. “DolphinAttack…” ACM CCS 2017. DOI: 10.1145/3133956.3134052.